机器人辅助关节置换术操作规范(草案)
发布日期:
2024-09-30
制定者:
出处:
中华骨与关节外科杂志,2024,17(9):769-780.
摘要:
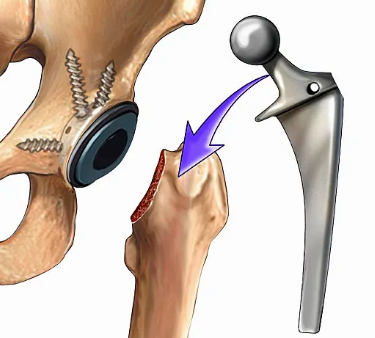
为顺应我国机器人辅助关节置换术的迅猛发展趋势,中华医学会骨科学分会关节外科学组专家团队基于Mako 系统,历经2 轮线上会议与函审,最终由王坤正教授审查定稿,制定了《机器人辅助关节置换术操作规范(草案)》(以下简称“本规范”)。本规范聚焦于机器人辅助全髋关节置换术(RA-THA)与机器人辅助全膝关节置换术(RA-TKA)的操作,详细阐述了手术适应证及禁忌证、手术规划、手术操作流程、围手术期管理及并发症的防治,确保其科学性与实用性。本规范旨在提升手术精确性与成功率,降低并发症风险,为临床医师提供标准化指南,以提升手术安全性和有效性,最终使患者受益。
展开
部分内容仅可在
临床指南app 查看下载
阅读免费指南
发送到邮箱
收藏
分享
评论
提交评论

power.sks
2024.10.17
回复
交互体验非常好
/ 没有更多了 /
上传者信息

最爱骨科
于2024-10-17上传
编者信息

中华医学会骨科学分会
中华医学会骨科学会是孟继懋教授、叶衍庆教授倡议并发起成立,并经申请批准,于1980年 5月在天津举行中华医学会第一次骨科学术会议时正式宣布中成立。根据国内形势发展需要,学会还组织专家组举办了各种专题讲学班和学术研讨会,如 手外科、创伤、关节疾病、骨肿瘤、脊柱疾患等等,内容丰富,既提高了学员的骨科基础理论和技能,又交流了专业知识,身手广大学员的欢迎。



置顶



